Default vs. Ours
Go1 default controller exhibits excessive roll, whereas our controller achieves superior balance control, resulting in lower noise levels.
ICRA 2026
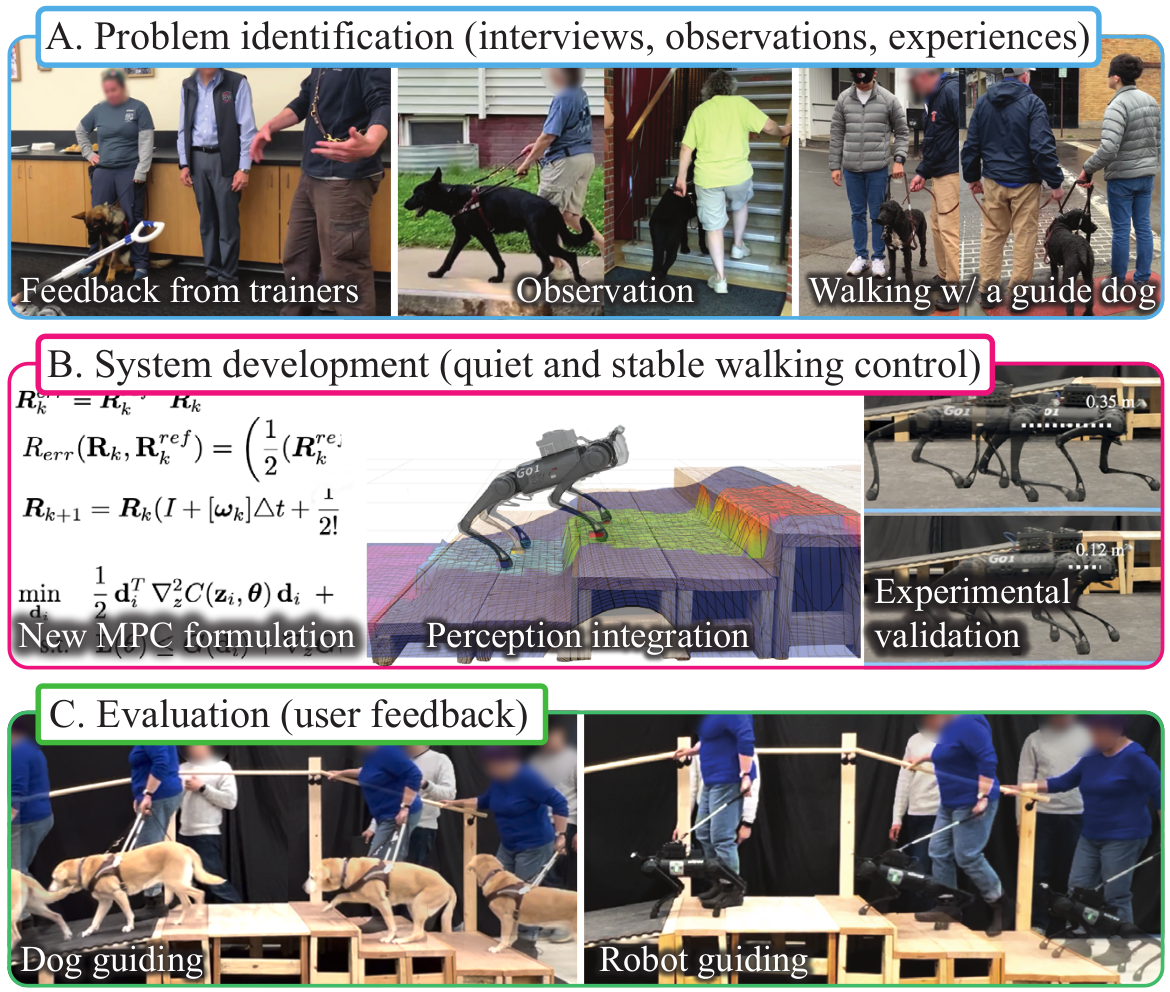
Noise and jerky motion during walking are critical drawbacks of existing quadruped robots.
Acoustic and physical disturbances can be particularly disruptive for blind and low-vision individuals, who rely heavily on environmental sounds for navigation.
To address these issues, we developed a novel walking controller for slow stepping and smooth foot swing/contact while maintaining human walking speed, as well as robust and stable balance control. The controller integrates with a perception system to facilitate locomotion over non-flat terrains.
Our controller was extensively tested on the Unitree Go1 robot and, when compared with other control methods, demonstrated significant noise reduction – half of the default locomotion controller.
In this study, we adopt a mixed-methods approach to evaluate its usability with BLV individuals.
Results demonstrated superior acceptance of our controller, highlighting its potential to improve the user experience of guide dog robots.
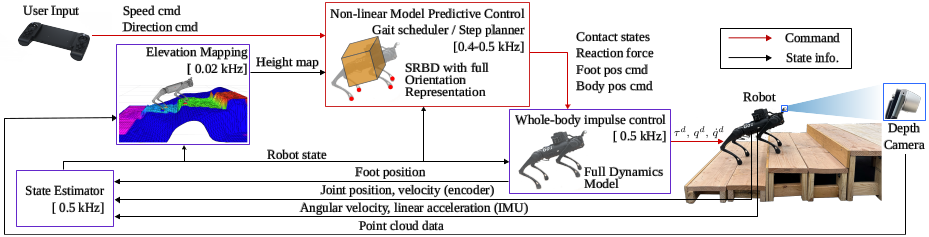
To develop a noise-suppressed guide-dog locomotion controller, our primary goal was to reduce the stepping frequency and ensure gentle foot contacts by employing a combined NMPC+WBIC architecture.
NMPC (with full orientation representation) is solved by single-iteration SQP, which allows 500 Hz update frequency, minimizing latency and enhancing overall robot stability.
Go1 default controller exhibits excessive roll, whereas our controller achieves superior balance control, resulting in lower noise levels.
We tested our controller on a Unitree Go1 robot to quantitatively evaluate noise reduction and stability.
We employed a mixed-methods approach to evaluate the walking and stair-climbing experience enabled by our controller with four BLV individuals.